

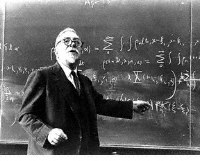
 Norbert Wiener
Norbert Wiener
|
1948
Norbert Wiener published "Cybernetics," a major influence on later
research into artificial intelligence. He drew on his World War II experiments
with anti-aircraft systems that anticipated the course of enemy planes by
interpreting radar images. Wiener coined the term "cybernetics" from
the Greek word for "steersman."
In addition to "cybernetics," historians note Wiener for his analysis of brain waves and for his exploration of the similarities between the human brain and the modern computing machine capable of memory association, choice, and decision making. |
|
 APT ashtray
APT ashtray
|
1959
MIT's Servomechanisms Laboratory demonstrated computer-assisted manufacturing.
The school's Automatically Programmed Tools project created a language, APT,
used to instruct milling machine operations. At the demonstration, the machine
produced an ashtray for each attendee.
|
|
 UNIMATE
UNIMATE
|
1961
UNIMATE, the first industrial robot, began work at General Motors. Obeying
step-by-step commands stored on a magnetic drum, the 4,000-pound arm sequenced
and stacked hot pieces of die-cast metal.
The brainchild of Joe Engelberger and George Devol, UNIMATE originally automated the manufacture of TV picture tubes. |
|
 Rancho Arm
Rancho Arm
|
1963
Researchers designed the Rancho Arm at Rancho Los Amigos Hospital in Downey,
California as a tool for the handicapped. The Rancho Arm's six joints gave it
the flexibility of a human arm. Acquired by Stanford University in 1963, it
holds a place among the first artificial robotic arms to be controlled by a
computer.
|
|
|
1965
A Stanford team led by Ed Feigenbaum created DENDRAL, the first expert system,
or program designed to execute the accumulated expertise of specialists.
DENDRAL applied a battery of "if-then" rules in chemistry and physics
to identify the molecular structure of organic compounds.
|
||
 Tentacle Arm
Tentacle Arm
|
1968
Marvin Minsky developed the Tentacle Arm, which moved like an octopus. It had
twelve joints designed to reach around obstacles. A PDP-6 computer controlled
the arm, powered by hydraulic fluids. Mounted on a wall, it could lift the
weight of a person.
|
|
 Stanford Arm
Stanford Arm
|
1969
Victor Scheinman's Stanford Arm made a breakthrough as the first successful
electrically powered, computer-controlled robot arm. By 1974, the Stanford Arm
could assemble a Ford Model T water pump, guiding itself with optical and
contact sensors. The Stanford Arm led directly to commercial production.
Scheinman went on to design the PUMA series of industrial robots for Unimation,
robots used for automobile assembly and other industrial tasks.
|
|
 SRI's Shakey
SRI's Shakey
|
1970
SRI International's Shakey became the first mobile robot controlled by
artificial intelligence. Equipped with sensing devices and driven by a
problem-solving program called STRIPS, the robot found its way around the halls
of SRI by applying information about its environment to a route. Shakey used a
TV camera, laser range finder, and bump sensors to collect data, which it then
transmitted to a DEC PDP-10 and PDP-15. The computer radioed back commands to
Shakey -- who then moved at a speed of 2 meters per hour.
|
|
 Silver Arm
Silver Arm
|
1974
David Silver at MIT designed the Silver Arm, a robotic arm to do small-parts
assembly using feedback from delicate touch and pressure sensors. The arm's
fine movements corresponded to those of human fingers.
|
|
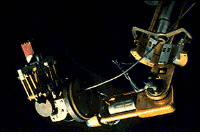
 Hirose's Soft Gripper
Hirose's Soft Gripper
|
1976
Shigeo Hirose's Soft Gripper could conform to the shape of a grasped object,
such as this wine glass filled with flowers. The design Hirose created at the
Tokyo Institute of Technology grew from his studies of flexible structures in
nature, such as elephant trunks and snake spinal cords.
|
|
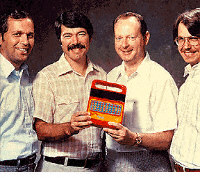 Speak & Spell creators
Speak & Spell creators
|
1978
Texas Instruments Inc. introduced Speak & Spell, a talking learning aid for
ages 7 and up. Its debut marked the first electronic duplication of the human
vocal tract on a single chip of silicon. Speak & Spell utilized linear
predictive coding to formulate a mathematical model of the human vocal tract
and predict a speech sample based on previous input. It transformed digital
information processed through a filter into synthetic speech and could store
more than 100 seconds of linguistic sounds.
Shown here are the four individuals who began the Speak & Spell program: From left to right, Gene Frantz, Richard Wiggins, Paul Breedlove, and George Brantingham. |
|
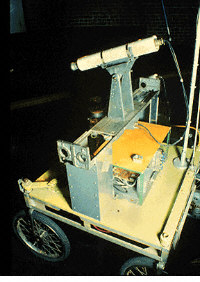 Stanford Cart
Stanford Cart
|
1979
In development since 1967, the Stanford Cart successfully crossed a
chair-filled room without human intervention in 1979. Hans Moravec rebuilt the
Stanford Cart in 1977, equipping it with stereo vision. A television camera,
mounted on a rail on the top of the cart, took pictures from several different
angles and relayed them to a computer. The computer gauged the distance
between the cart and obstacles in its path.
|
|
 MIDI
MIDI
|
1983
The Musical Instrument Digital Interface was introduced at the first North
American Music Manufacturers show in Los Angeles. MIDI is an industry-standard
electronic interface that links electronic music synthesizers. The MIDI
information tells a synthesizer when to start and stop playing a specific note,
what sound that note should have, how loud it should be, and other information.
Raymond Kurzweil, a pioneer in developing the electronic keyboard, predicts MIDI and other advances will make traditional musical instruments obsolete in the future. In the 21st century, he wrote in his book, "The Age of Intelligent Machines," "There will still be acoustic instruments around, but they will be primarily of historical interest, much like harpsichords are today.... While the historically desirable sounds of pianos and violins will continue to be used, most music will use sounds with no direct acoustic counterpart.... There will not be a sharp division between the musician and nonmusician." |
|
|
|
Copyright | Privacy | Feedback